




Researchers from Japan explore how the domesticated flightless silkworm moth (Bombyx mori), a prominent insect model in olfactory research, uses wing flapping to manipulate airflow, enhancing their ability to detect distant pheromones. These findings highlight how moths guide pheromones to their odour sensors in antennae and suggest potential applications for designing advanced robotic systems for odour source localization. This could inspire future innovations in drones and provide design guidelines for robots to locate odour sources.
The silkworm moth (Bombyx mori) is an insect that no longer flies due to domestication. The males use their antennae to detect pheromones emitted by females, and they respond very acutely. They have been used as model insects for the study of their odor source localization. Flying insects flap their wings when they fly, and silkworm moths are also known to flap their wings (called fanning) when they detect pheromones, even though they do not fly.
As pheromone molecules move through space in the air, the air flows produced by the flapping of wings undoubtedly have a strong influence on odour detection. However, the effect of this flapping of wings was not known quantitatively.

To address this question, a group of scientists led by Dr. Toshiyuki Nakata from the Graduate School of Engineering, Chiba University, investigated how B. mori detects pheromones. “We understand that silkworm moths detect pheromones by flapping their wings to induce airflows around them. However, the precise impact of this wing flapping on the moths’ ability to localize the odour source is unclear,” explains Nakata while elaborating on the rationale for conducting this study.
The team included co-first author Daigo Terutsuki from the Faculty of Textile Science and Technology, Shinshu University; Chihiro Fukui from the Graduate School of Science & Engineering, Chiba University; Ryohei Kanzaki from the Research Center for Advanced Science and Technology, The University of Tokyo; and Hao Liu, from the Graduate School of Engineering, Chiba University.
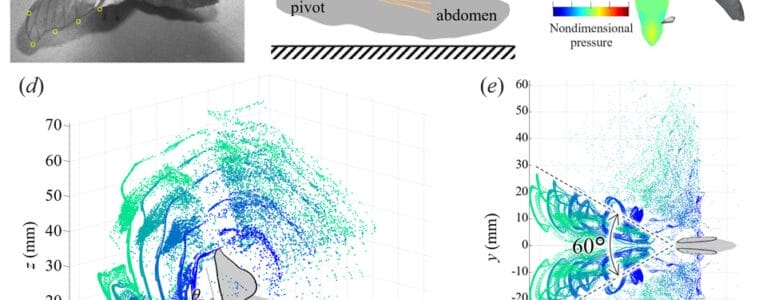
Their study, published on August 2, 2024, in Volume 14 of Scientific Reports, employed high-speed photogrammetry—a technique that uses high-speed cameras to capture and reconstruct the motion and geometry of objects—to computationally analyze the aerodynamic consequences of wing motions of B. mori. Researchers meticulously recorded the wing movements during fanning and built a detailed computational model of the insects and surrounding airflow. Using the simulated data, they subsequently calculated the motion of particles that resemble the pheromone molecules around the fanning silkworm moth.
One of the key findings of the study was that B. mori samples the pheromone selectively from the front. The moth scans the space by rotating its body while fanning to locate the pheromone sources. The directional sampling of the pheromone molecules is particularly helpful when searching for an odour source since the moth can determine the direction of the odour plume upon the detection of the pheromone.
Needless to say, the implications of this research extend beyond the study of insects. The insights gained from how B. mori manipulates airflow could lead to advancements in robotic odour source localization technologies. A team led by Dr Daigo Terutsuki is working on developing drones equipped with insect antennae for odour detection, with potential applications such as locating individuals in emergencies.
“The findings from this study highlight the importance of creating directional airflow when searching for odour sources using flying robots. This involves carefully adjusting the drone’s orientation and the configuration of its propellers and odour sensors to optimize detection capabilities,” notes Dr Nakata.
Furthermore, the study highlights the need for future research to consider environmental factors such as airflow turbulence and antenna structure, which also influence odour detection.
“Currently, robots rely heavily on vision and auditory sensors for navigation. However, as demonstrated by disaster rescue dogs, utilizing the sense of smell can be highly effective for locating humans. While the application of sensing smell in robots is still in its early stages, this research could help in developing robots that efficiently search for odour sources in disaster situations,” says Dr Nakata optimistically.

:focal(1276x487:1278x485)/origin-imgresizer.eurosport.com/2024/10/19/4052815-82193948-2560-1440.jpg?w=150&resize=150,150&ssl=1)






